As part of this task, I thought I'd share how I typically develop a driver for inclusion in CoreBASIC. Today, I'm constructing a driver for the L3G4200D MEMS gyroscope from STMicroelectronics. I've had a couple of breakout boards from SparkFun for a while now, and I ordered two.
First things first...
One of the first things that I do is wire up the breakout board to test it out. Historically, I hand-wired the boards to the SolderCore directly, but this is both time consuming and error prone. When I change my software, I want to be able to test that I haven't broken anything by quickly grabbing a module from our extensive library of hardware, plug it in, and go! Finding all the data on the chip, the breakout, and having prototyping wires srouting from boards takes much too much time.Instead, what I do now is use a CoreProto board and attach the breakout to it. Here's what I'll be snapping together:

I place the module on the CoreProto and wire-wrap it. My soldering and wire-wrapping skills are not the best, and I try to remove the flux with a cleaner, but to be honest, it's not my day job. This is what I end up with:

Once I've constructed that, I plug into into a SenseCore, which is installed on top of a SolderCore. Now I have a great sensor platform! Whenever I want to whip up a demonstration, or make sure that the latest modifications to the software haven't impacted the existing drivers, all I need to do is take a SolderCore, a SenseCore, and plug in the SExI-format module and I'm good!
This is what it looks like:

So now I am ready to try some software.
First connection
I have my hardware set up, so I need to see if the module is responding. To do this, the easiest thing is to use CoreBASIC interactively and poke the sensor. It's much faster to do this than construct a program in C, compile it, fix errors, download it, and debug why the blazes it's not working! As CoreBASIC already has full support for I2C and SPI, you have a great test platform at your fingertips, so why use something more fiddly and less immediate?
Great! The sensor is working. I can communicate with it. From there on, I can play with the registers from the datasheet in CoreBASIC and make sure I understand what I am seeing.
Write it in C...
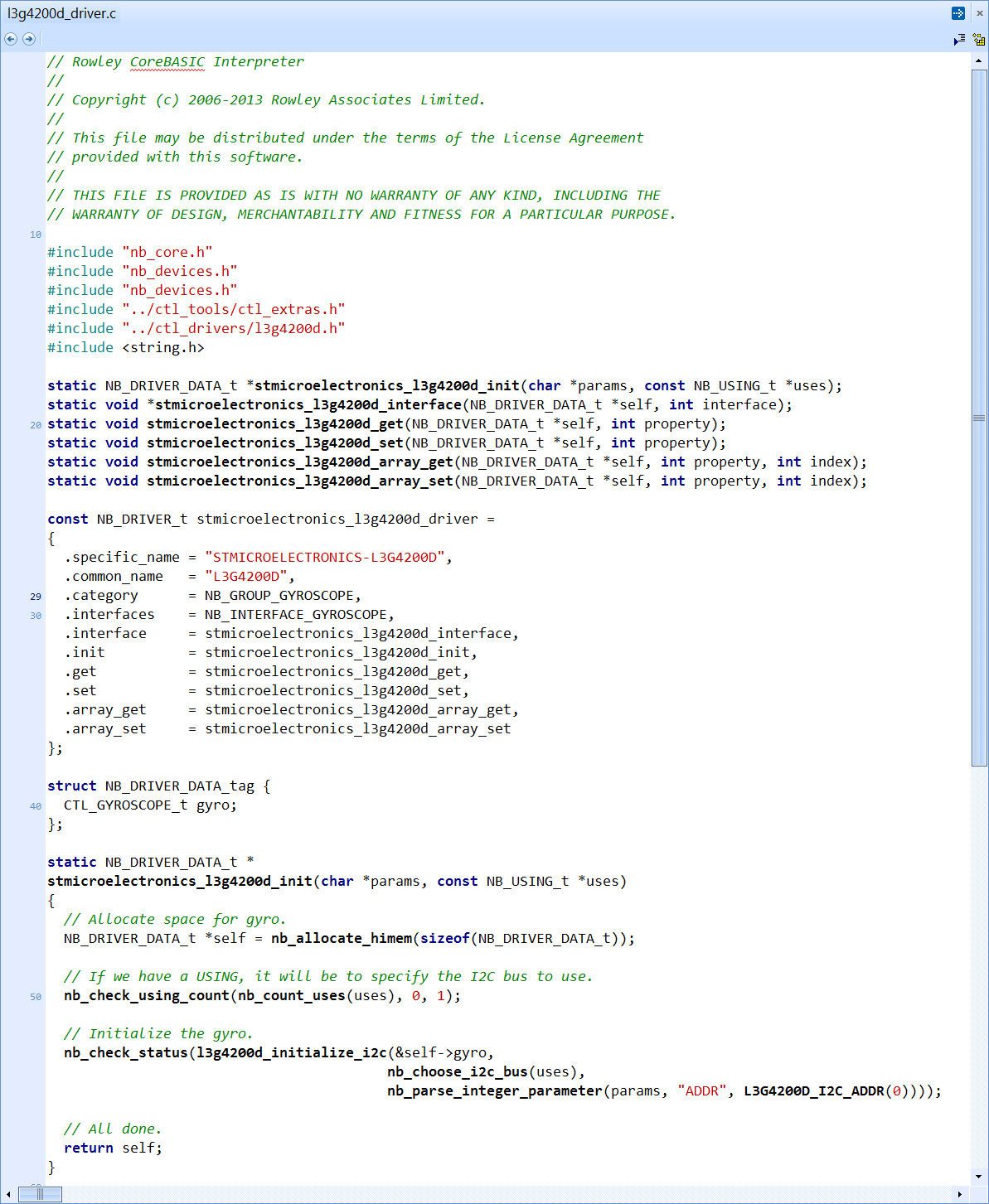
From there, it's a short distance to write the code in C and integrate it into the set of confidence tests. I write the driver in C and use CrossWorks to compile it into the CrossWorks Device Library:
The I write the confidence tests to ensure that I can communicate and demonstrate that it works as I expect:


So, now I have the sensor working in C. What I need to do now is construct the CoreBASIC interface onto this sensor, which is pretty much gruntwork because the hard work is already done:
Drum roll please...
And now, of course, it's available in CoreBASIC!
How easy is that to read a gyro? A CoreBASIC user can do it, interactively, in just two lines. No C compiler, no compilation, nothing. Immediate.
Statistics
So, here are some vital statistics for this task. The whole exercise took about four hours to integrate the sensor: from making the SExI module to firing up CoreBASIC and printing the gyro readings.The low-level driver code, confidence tests, and CoreBASIC integration is about 500 lines of code, but that does not include all the framework functions such as I2C drivers, gain and bias application, bus selection, and so on, as that is already written.
However, with all that code written, it immediately works on all implementations of CoreBASIC (SolderCore, Freedom Board, Raspberry Pi) and on all C platform targets that we support. Great!
No comments:
Post a Comment